I’m writing this a bit late, but wanted to go back and highlight a major accomplishment achieved at the May 23rd meeting. The intervening meetings have been focused on packing and moving our primary development site from the The Forge Downtown @ Hopewell Academy to the new Forge Headquarters at 3300 Green Level West Rd.
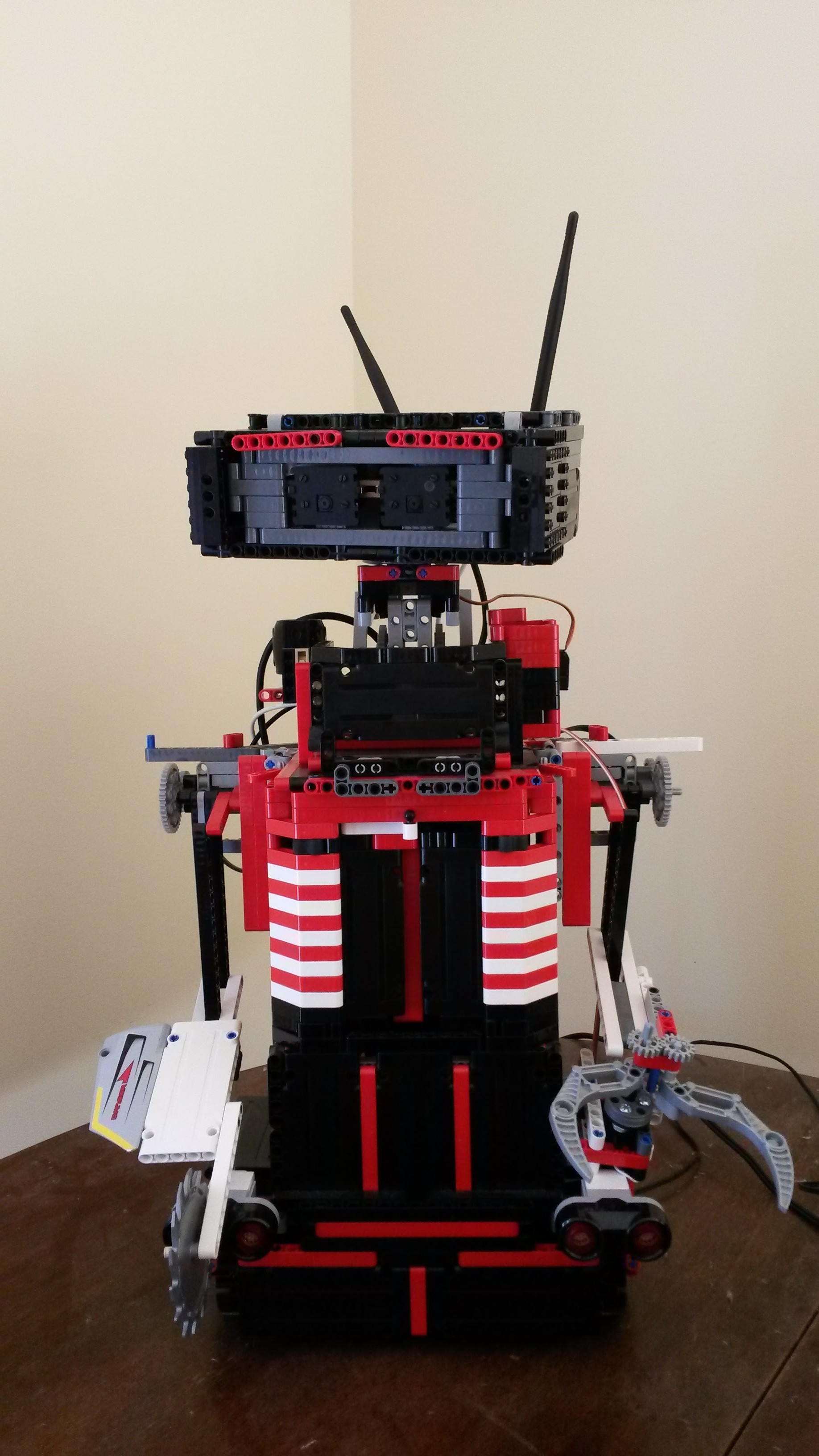
We have talked about many times how it would be fun to have two humanoid robots talking to each other. We finally got to the point of demonstrating this with PyroKEN (the 3rd KEN robot built primarily by current and former PyroTech team members) and KEN4 (the 4th KEN robot built by a variety of folks). After initiating the conversation, the two robots talked back and forth for 10-15 minutes.
A small, but effective team gathered for our last meeting in March. We had one visitor who contacted us through this web site, and we’re hoping he’ll come back. While the Sculpture team worked on a new display stand for PyroKEN, the Mechanism team worked on mounting the USB power distribution brick and cable management. Then, the Intelligence team took over to fix several issues: Smooth shutdown was implemented, joystick support was added, and neck calibration was done. A new set of speakers was tested and verified to give PyroKEN a loud voice. This was dubbed the PyroKEN Boom Vox. This left PyroKEN in pretty good shape with only the microphone still needing some configuration work.
This was the last of our four week open meeting period. To make progress on the project, we need team members to commit for a few months, so we can have consistency from week to week. Although we were still missing some potential contributors from the FIRST Robotics Competition team, who are very busy with their FRC build season, it was clear that those who attended were dedicated to making this project a success.
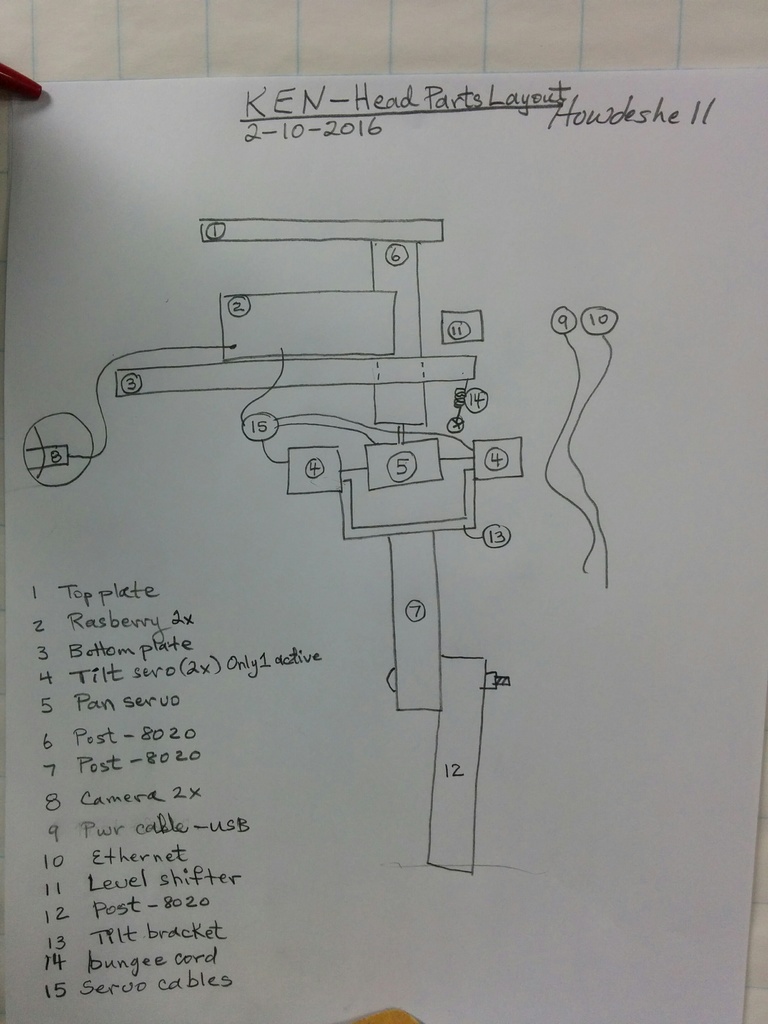
We worked on three fronts during this meeting: Physical, software, and personality. The team members most interested in the sculpture, mechanism, and central nervous system worked to catalog KEN’s parts. To build a new robot, we need to know what to purchase based on what is already in KEN. A talented member of the team drew a detailed diagram of KEN’s neck mechanism.
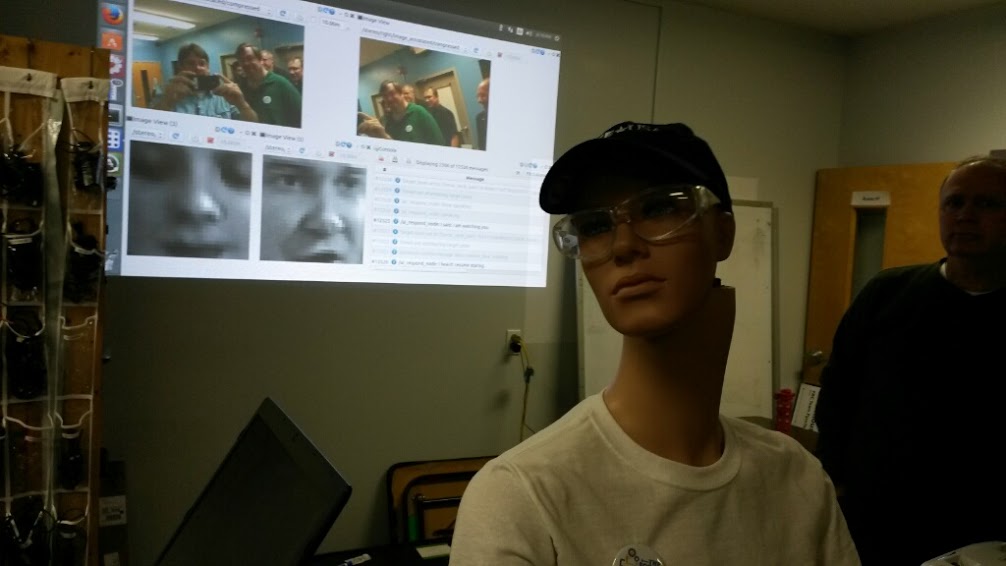
Another group of team members interested in the software and intelligence experimented with enhancements to the face recognition software. In the Feb 3 meeting, the face recognition software was shown to be broken. Investigation was done during the week to identify the cause. Some speculative enhancements were removed and some parameters adjusted to get the system working better. Testing at the meeting showed that performance was improved, but still not good enough. Two brothers were confused (they look similar, but not identical). Two unrelated students were incorrectly linked as the same identity. One student was not successfully recognized. More work is needed to improve the algorithm further.
The final group worked on learning the mechanism to define KEN’s personality. Three computers were set up with KEN’s conversation software. The team members were shown how to log into the computers and edit the AIML files to define how KEN responds. Because of time constraints, we didn’t get very far with implementing new conversations. That will be an ongoing activity.
February 3, 2016, was the third of our four introductory meetings for the project. This meeting had three objectives: 1) Fix KEN, 2) Master face recognition, and 3) Design new conversations.
Since the ECPI demo the previous day had suffered from a breakdown in one of KEN’s Raspberry Pi computers, we assigned a team to investigate the root cause. They determined that the cause was a faulty micro-USB power plug. Great job, team!
Face recognition is one of the features of the robot which is really cool, but can be hard to demonstrate, because it is sensitive to a variety of conditions. The goal of this activity was to help the team become comfortable with this feature and learn how to demonstrate it. We set the goal of getting the robot to recognize everyone in the group. Since KEN was tied up with the repair team, KEN’s Uncle Ross (the LEGO predecessor prototype to KEN) was brought in to help.
We attempted face recognition with two team members before it was clear that something is wrong with the algorithm as currently implemented, because it was already getting confused. We talked briefly about how the algorithm matches faces, but concluded that some bug investigation is needed to find out why it wasn’t working correctly.
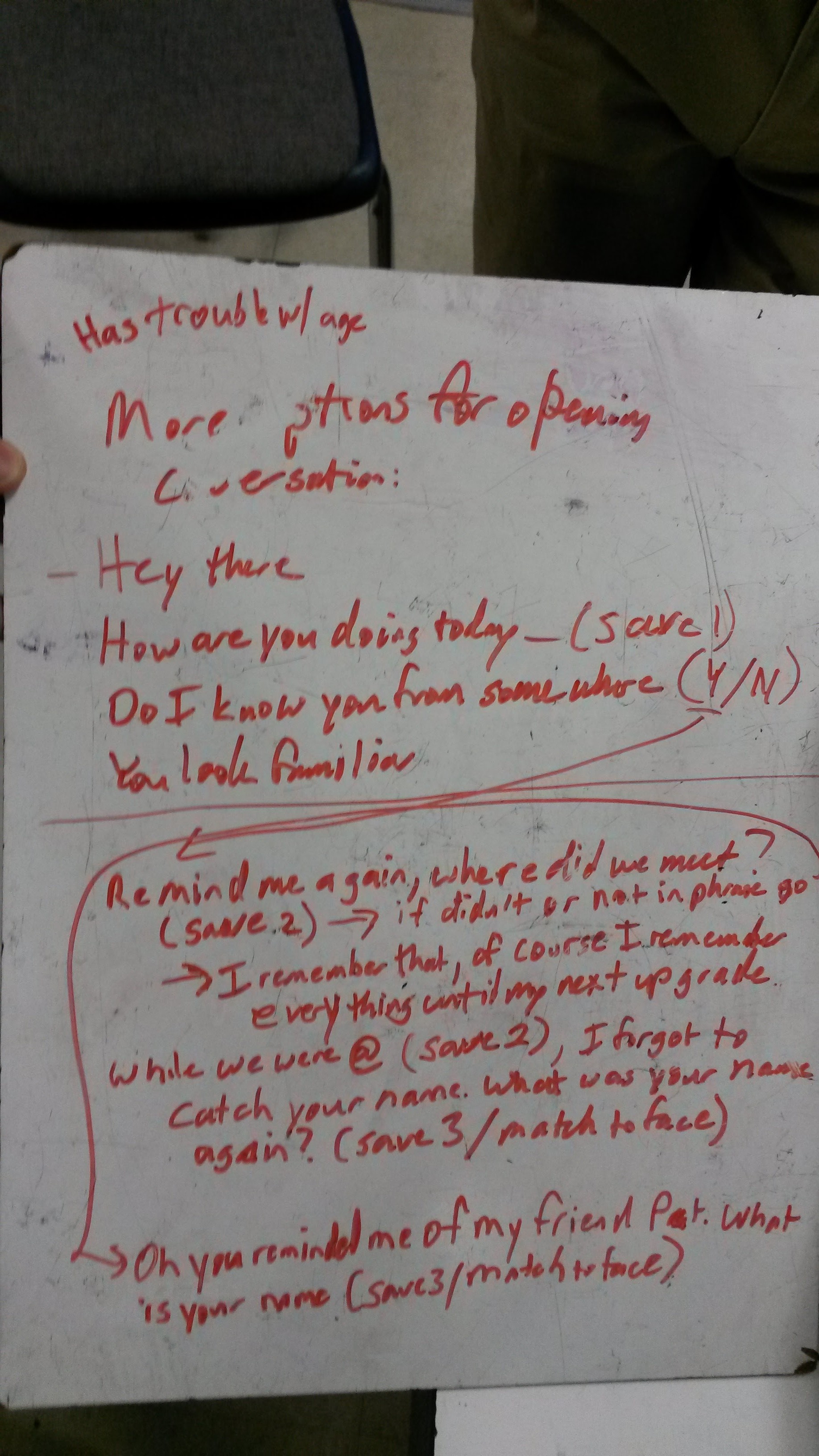
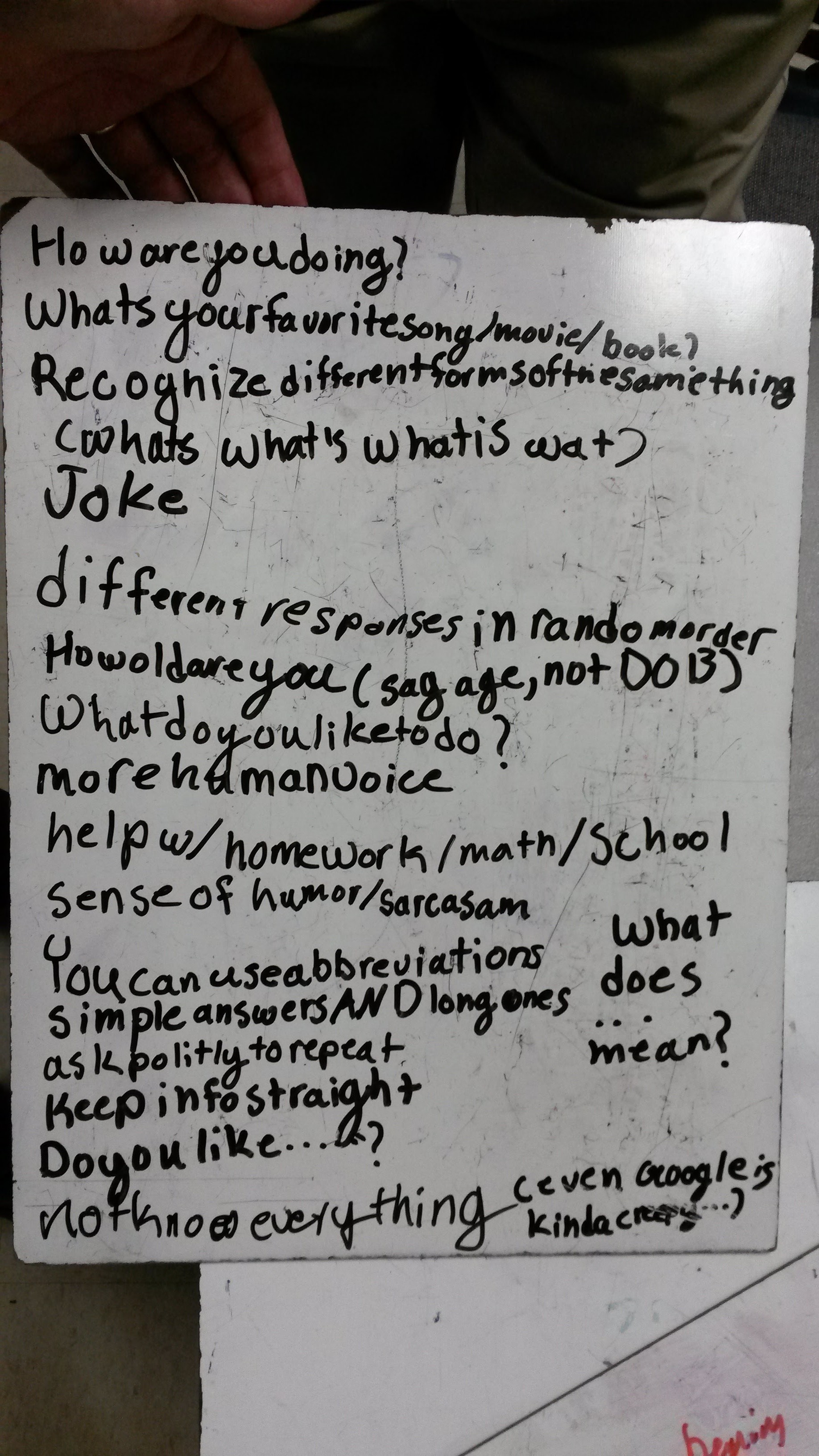
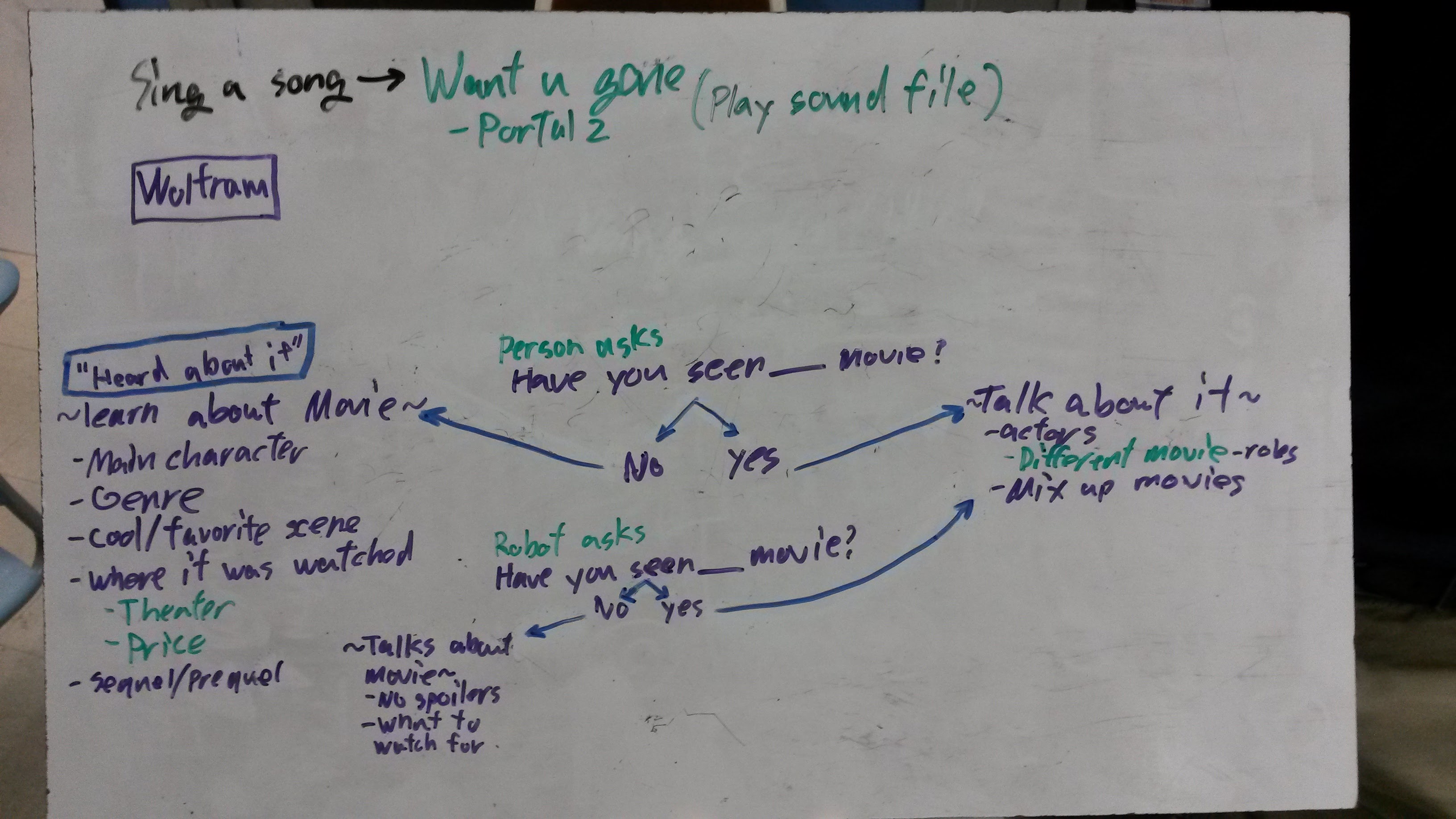
The final activity was to design new conversations for KEN. Everyone had experienced some of the awkward things KEN will say, so this was a chance to define how KEN should respond. The goal was to take these ideas and then show how they can be coded into the system. To support this, we had three systems set up to run KEN’s AI system. This way small teams could test out how KEN currently responds while thinking of improvements. Many good ideas were captured, and we got to see a little preview of how these ideas can be translated into code.
On Tuesday, February 2, 2016, KEN made an appearance at ECPI University in Raleigh, NC. Tony Gonzalez, an engineering student at ECPI, organized the event to promote IEEE student membership and the formation of a new IEEE student branch at ECPI. The event was well attended with 59 participants including students, professors, and organizers. The IEEE Humanoid Robot Project was invited to present KEN as an illustration of some of the activities that are happening through IEEE in Eastern North Carolina.
After an overview of IEEE and student membership benefits by Tony, Daniel demonstrated KEN. Maria Hunter also provided an overview of The Forge Initiative and our collaboration on the Humanoid Robot project. The meeting was scheduled for 30 minutes, and the formal presentation was completed in that time; however, audience questions and interaction continued for another 40 minutes, making it a very exciting and interactive event.
One downside to the event was that KEN’s look around behavior was not functioning. Investigation by the team at our weekly project meeting the following night determined that the micro-USB plug which powers one of the Raspberry Pi computers was not making a reliable connection and will need to be replaced.
At our Jan 27 meeting, we had about 30 people in attendance including an important visitor from the IEEE Foundation, which is providing the grant for our work this year. We were pleased to welcome Karen Galuchie, the Executive Director of the IEEE Foundation, who joined to observe the meeting. The participants rotated through three activities. The first activity involved setting up KEN and troubleshooting issues. The second activity was a discussion on the mechanical design of the neck mechanism and brainstorming on how to improve it. The third activity focused on how KEN interacts with people and designing approaches to improve the interaction.
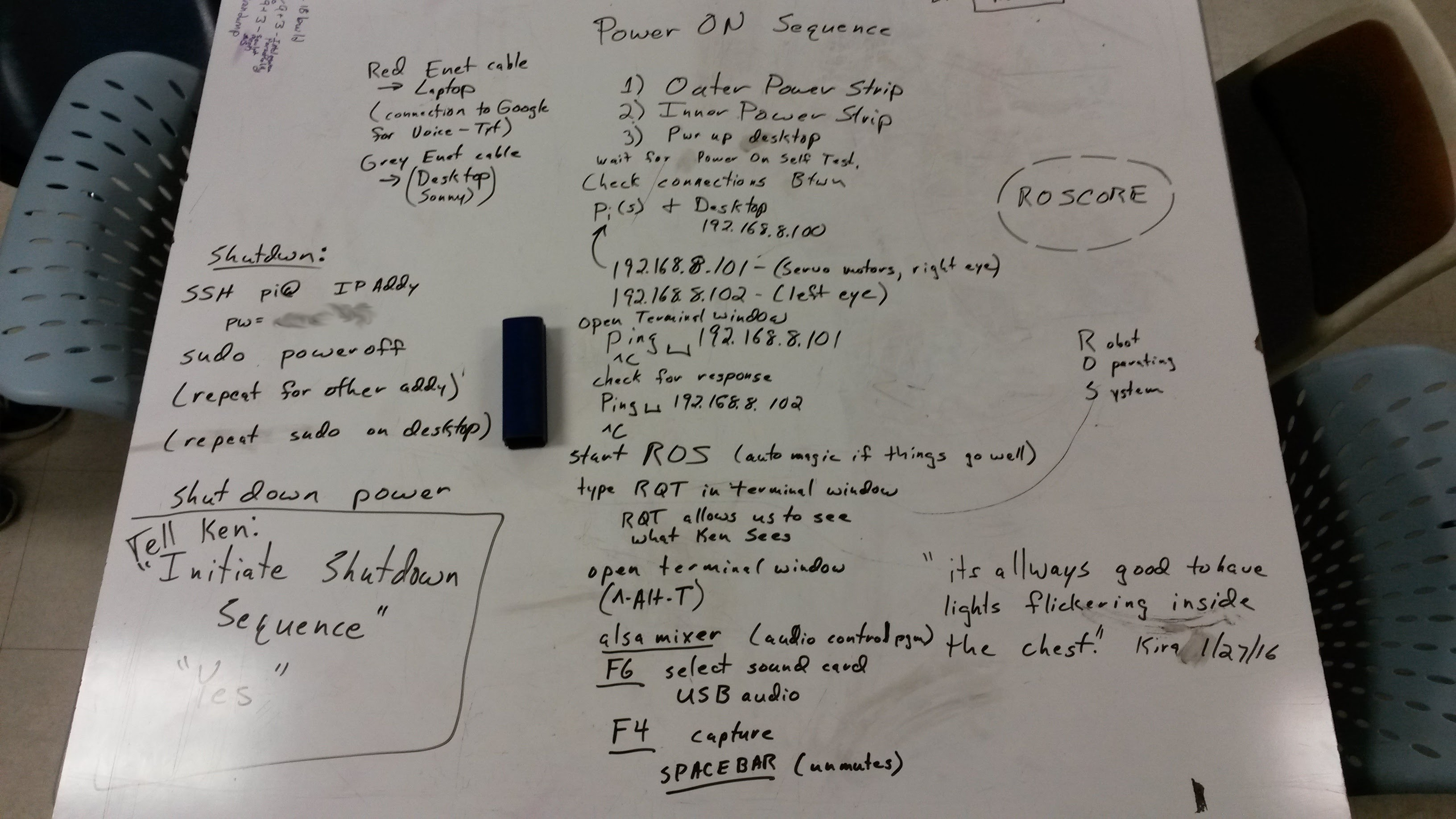
During the troubleshooting activity, the team was asked to set up KEN without any guidance from the experts. Then, we tried to observe what went wrong and figure out how to correct it. Here’s a picture of some notes we captured on the tabletop whiteboard documenting some of the steps.
The steps to get KEN running are not usually this complicated, but in this case, the network cables were plugged in incorrectly (remember, the team was doing this without instructions), which caused the network to fail to start, which cascaded failures to other components. Most of the effort was to shut the systems down cleanly, and restart them after the network cable issue was corrected.
Wednesday, January 20 saw the first full meeting of the Humanoid Robot Project collaboration between IEEE and The Forge Initiative. It was an exciting night with 23 attendees who were all eager to get involved with building a humanoid robot. We started with a team building exercise in the hallway where we self-organized into affinity groups according to various questions which helped us to see how different people in the group have different interests and preferences.
Our second agenda topic was an overview of the areas of focus of the project. The project is being organized around five key areas: Sculpture, Mechanism, CNS, Intelligence, and Personality. The areas are all interdependent, but each has its own skill set and objectives. Sculpture is focused on the outer skin and making a beautiful, human-like appearance. This will require artistic modeling skill from the sculptors working in this area. Mechanism is focused on bringing the robot to life by giving it power and movement. This is the hidden inner structure which makes the robot move in realistic ways. This will require electro-mechanical design and engineering skill. CNS is the central nervous system and represents the computer and communication systems required to coordinate and control the robot’s mechanisms and support its software. This area needs people with computer engineering and networking skills. Intelligence is the area where the robot’s abilities arise and are integrated through software algorithms. This is where video becomes vision and audio becomes hearing, where intent becomes motion and a thought becomes a voice. Programming and algorithm design skill thrives in this area. The final area, Personality is where all the other areas come together to make a unique robotic individual. Here is where the social interaction of the robot is sculpted through interaction design, conversation design, and gesture animation.
Following the discussion of the project areas, the students were invited to experience setting up KEN. With only verbal guidance from KEN’s creators, they set up and plugged in all of KEN’s components and started him running successfully.
We continued the meeting by breaking into affinity groups around the project areas of interest. Sculpture and Personality went to a separate room to learn more about KEN’s visible and social presence and to brainstorm ideas and enhancements to apply to the next robot to be built. Mechanism, CNS, and Intelligence stayed with KEN and received in depth, hands-on tutoring on KEN’s neck servo mechanism and software framework.
Removing KEN’s face to see the underlying structure was a highlight of this activity. Finally, the teams swapped rooms to give everyone a chance to explore all the project areas.
Everyone expressed on interest in at least one project area, and every project area had multiple people interested. All in attendance indicated that it was a fun and productive meeting and regretted that we didn’t have time to do even more.
As part of the exhibit titled Life’s Little Dramas: Puppets, Proxies, and Spirits, NCSU Libraries event planners invited Ken Boone of Ken’s Robots and Triangle Amateur Robotics (TAR) fame and the IEEE ENCS Humanoid Robot Project team to present our robots at the D. H. Hill Library in Raleigh, NC, on Wednesday, January 20, at 3:00 pm. Ken Boone started the show by explaining the history of the TAR club and the Mars Sojourner replica the club built, which has been on display as part of the exhibit. KEN the humanoid wrapped up the presentation by describing his capabilities to the audience of about 70 people and answering their questions.
KEN donned a pair of safety classes at The Forge Downtown’s Hopewell Academy site for the 2016 kickoff meeting of the IEEE ENCS Humanoid Robot Project and partnership with The Forge Initiative on Wednesday, January 13, 2016. We discussed our plans to build four new robots this year starting with a copy of KEN. Ideas were shared about enhancements that we are considering for the V2 design, of which we hope to build three copies by year end. Some ideas being considered are articulated eyes and blinking eyelids, a soft chest with breathing motion, articulated arms for gesturing and pointing, improved hearing and conversation handling, improved face and object recognition, and customizable personality.
Students will play a key role in building the new robots. Our new meeting schedule is weekly on Wednesdays from 6:30-8:30 pm. The first half hour is for the adult mentors to meet and plan with student build activities beginning at 7 pm.
For nearly a century, science fiction writers have imagined a future in which robots, indistinguishable from humans, interact and function in normal human societies.
Students from The Forge Initiative interact with KEN during an outreach event. Photo courtesy of Grayson Randall.
For thousands of students across North Carolina, that future is now. The Eastern North Carolina Section of the IEEE has been awarded an IEEE Foundation Grant to advance STEM Education through the use of humanoid robotics. The grant, titled “STEM Outreach Using Student-Built Humanoid Robots,” will help fund a year-long mentoring and outreach program designed to bring cutting-edge robotics technologies to students and families across North Carolina.
Funding from the grant will support a partnership between the Eastern North Carolina Section of the IEEE and The Forge Initiative, a STEM education nonprofit based out of Cary, North Carolina. Volunteer mentors from the two organizations will work with middle and high school students to assemble and customize humanoid robots based on an existing prototype. Students will also learn to present the robots at STEM outreach events across North Carolina, providing opportunities for at least 4,000 people to interact with the robots.
The existing prototype, nicknamed Ken, was developed by the Eastern North Carolina Section Robotics and Automation chapter as part of a challenge to build a robot “indistinguishable from a human.” Ken made his official debut in March 2015 at the IEEE North Carolina RoboResearch Seminar, and has been delighting adults and children alike ever since. According to Project Director Grayson Randall, “It is wonderful to see how excited students get when engaged in spontaneous natural-language discussion with a robot. You can see their interest growing with every word. We hoped to expand this program dramatically to encourage more interest in STEM careers. We just needed the perfect partner.”
The Forge Initiative is that partner. Linda Whipker, President of The Forge Initiative, stated, “Our mission is to focus on youth development and leadership through hands-on STE(Art)M education and community engagement. Working with the IEEE will allow us to add another dimension to our offerings.” Together, the IEEE and The Forge Initiative will help the future engineers of North Carolina bring about the future of robotics.
About the IEEE Foundation
As the philanthropic arm of IEEE, the IEEE Foundation inspires the generosity of donors so it may enable IEEE programs that enhance technology access, literacy and education, as well as support the IEEE professional community.
The IEEE Foundation, a tax-exempt 501(c)(3) organization in the United States, fulfills its purpose by soliciting and managing donations, recognizing the generosity of our donors, awarding grants to IEEE grassroots projects of strategic importance, supporting high impact Signature Programs, serving as a steward of donations that empower bright minds, recognize innovation and preserve the history of technology. With donor support, the IEEE Foundation strives to be a leader in transforming lives through the power of technology and education.